「貝茲曲線」修訂間的差異
跳至導覽
跳至搜尋
(→二次貝茲曲線) |
|||
| 第30行: | 第30行: | ||
給定的點是: | 給定的點是: | ||
:P<sub>0</sub>=(0,0) | :P<sub>0</sub>=(0,0) | ||
| − | :P<sub>1</sub>=( | + | :P<sub>1</sub>=(α,β) |
| − | :P<sub>2</sub>=( | + | :P<sub>2</sub>=(ɭ,0) |
它們代入 y 的方程,我們得到: | 它們代入 y 的方程,我們得到: | ||
| − | :y(t)=(1−t)<sup>2</sup>×0+2(1−t) | + | :y(t)=(1−t)<sup>2</sup>×0+2(1−t)t×β+t<sup>2</sup>×0=2β×t(1−t) |
對其進行微分: | 對其進行微分: | ||
| − | :y′(t)= | + | :y′(t)=2β−4βt |
將斜率設為 0 以解 t: | 將斜率設為 0 以解 t: | ||
| − | : | + | :2β−4βt=0 |
:t=0.5 | :t=0.5 | ||
將 t=0.5 代入 y(t) ,我們得到: | 將 t=0.5 代入 y(t) ,我們得到: | ||
:y(0.5)=100(0.5)(0.5)=25 | :y(0.5)=100(0.5)(0.5)=25 | ||
因此,最低點的 y 值是 25,最高點因為在端點上,所以是 0 。 | 因此,最低點的 y 值是 25,最高點因為在端點上,所以是 0 。 | ||
| + | |||
===一般化:=== | ===一般化:=== | ||
<img src='https://upload.wikimedia.org/wikipedia/commons/d/da/ControlPointsAndGraphicsOfQuadraticB%C3%A9zierCurve.svg' width='95%' height=* /> | <img src='https://upload.wikimedia.org/wikipedia/commons/d/da/ControlPointsAndGraphicsOfQuadraticB%C3%A9zierCurve.svg' width='95%' height=* /> | ||
於 2023年9月16日 (六) 14:20 的修訂
二次貝茲曲線
- 二次貝茲曲線畫出的是拋物線,無法畫出橢圓和雙曲線。故無法畫出正圓。
- 所有拋物線都「相似」(不是相等),且所有曲率(0~infin)的微線段都有。
- 兩端點外只有一個控制點。
- 拋物線方程式 ax2+bxy+cy2+dx+ey+f=0 則 b2 - 4ac=0 ,即前三項為完全平方式。
參考
- 二元二次方程式圖形判別的例題
---------- 擬合圓 ---------- - How to create circle with Bézier curves?
- 如何使用Bézier曲線創建圓?
- 用三阶贝塞尔曲线拟合圆
一、圖形最低點與控制點的關係
| Q or q (quadratic Bézier curve) |
x1 y1 x y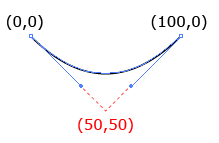 <path d='M0,0 Q50,50 100,0' style='stroke:black'/> <path d='m0,0 q50,50 100,0' style='stroke:black'/> |
從目前點的座標畫條 二次貝茲曲線到指定 點的 x,y 座標:其中 x1,y1 為控制點 |
|
二次貝茲曲線的參數方程為:
B(t)=(1−t)2×P0+2(1−t)t×P1+t2×P2
其中:
- t 是一個介於 0 到 1 之間的參數
- P0 是起點
- P1 是控制點
- P2 是終點
為了找到最大和最小的 y 值,我們可以對 y 的方程進行微分,並將其設為 0 以找到可能的極值。
給定的點是:
- P0=(0,0)
- P1=(α,β)
- P2=(ɭ,0)
它們代入 y 的方程,我們得到:
- y(t)=(1−t)2×0+2(1−t)t×β+t2×0=2β×t(1−t)
對其進行微分:
- y′(t)=2β−4βt
將斜率設為 0 以解 t:
- 2β−4βt=0
- t=0.5
將 t=0.5 代入 y(t) ,我們得到:
- y(0.5)=100(0.5)(0.5)=25
因此,最低點的 y 值是 25,最高點因為在端點上,所以是 0 。
一般化:

(一)起迄點水平排列, y 的極值均在 t=0.5 處
上述推理完全沒有使用到 x 座標,可見只要起迄點水平排列,不論控制點的 x 座標為起迄點的居中或偏左或偏右,都是在 t=0.5 時, y 座標降到控制點垂直距離之半,並且為最低點。